par Yann B.
 Le CRAKEN est mon deuxième modèle réduit de sous-marin ... Il est en cours de réalisation, vous pourrez donc lire une sorte de journal de construction. Le CRAKEN est mon deuxième modèle réduit de sous-marin ... Il est en cours de réalisation, vous pourrez donc lire une sorte de journal de construction.
Mais avant d'aller plus loin, faisons un saut dans le passé ...

 cliquez sur la photo pour l'agrandir |
|
La coque est en trois parties. L'avant est en bois et est collé à la partie centrale en PVC (tube sanitaire). Le tronçon arrière est en fibre de verre et résine (technique du moule perdu) et s'emboîte dans la partie avant grâce à un insert en bois. L'étanchéité se fait par un système similaire à celui du Sigara (joint silicone moulé en place). Pour la petite anecdote, j'ai du déboîter les deux parties du sm au pied de biche après le moulage du joint => ne pas oublier de savonner ! |
La motorisation est assurée par quatre moteurs Speed 280, deux pour l'immersion, deux pour la propulsion et la direction. Ils sont commandés par des variateurs à base de ZN 409 (plan RC marine) et alimentés en 4,8 V (même packs de batteries que la réception, c'est pratique).
Comportement en navigation sans grandes surprises : il est très (trop ?) maniable ; mais ... avec un peu d'entraînement on se fait très bien au pilotage sur deux moteurs.
Pour fluidifier les trajectoires et éventuellement simplifier le pilotage, j'ai installé un peu plus tard un empennage amovible (en tôle d'alu ). L'effet est très net, la qualité des trajectoires a été bien améliorée mais en revanche (on ne peut pas tout avoir !!) on perd en maniabilité, le rayon de virage passant de 0 à 50 cm.
Ce bateau a très bien fonctionné de 97 à 99, mais les petits problèmes se sont multipliés et j'ai fini par le remiser définitivement. J'ai voulu profiter de cette première expérience très fructueuse pour réaliser une machine plus fiable et évoluée. Revenons donc au sujet principal ...

Conception :
J'ai fait le dessin de la coque dans le courant de l'année 2000 (recherche d'une forme de coque puis choix des dimensions). J'ai aussi tracé les différentes vues ainsi qu'une coupe tous les 10 mm pour pouvoir en tirer la forme précise en 3D.
Le plus gros du concept du Notonecte sera conservé (quand ça marche ...!!):
Coque d'assez petite taille (avantage à ne pas négliger car masse pas trop importante et possibilité d'utiliser de très petits plans d'eau).
Dimensions : L=260mm l=200mm (moteurs compris) h=120mm
 cliquez sur la photo pour l'agrandir |
|
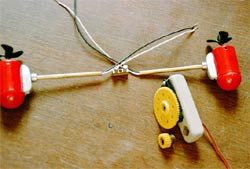
Deux moteurs extérieurs commandés indépendamment : c'est plus maniable (J'avais pensé, un moment, les commander ensemble et rajouter à l'arrière un moteur en travers pour la direction, un peu comme avec un anticouple sur un hélicoptère, mais son intégration dans la coque prenait trop de place, alors ...). Ils sont orientables, dans le plan vertical, sur environ 180°, par un système de pignons (provenance mécano) monté sur un servo (un MS-X3 pour ceux qui voudraient tout savoir) et disposeront de la marche av et ar.
|
J'ajouterai à cela un ballast et d'autres équipements parmi lesquels un bras manipulateur dont je reparlerai.
La coque :
Vu sa forme, la meilleure manière pour l'obtenir était le moulage. La technique du moule perdu est la plus simple (elle permet en plus d'avoir une coque en une seule partie), encore faut-il disposer du moule en question. N'ayant aucun talent de sculpteur et voulant rester fidèle aux plans, j'ai employé une technique (applicable à toutes formes de moules) un peu tordue mais assez rapide et qui a donné un très bon résultat.
- Tout d'abord, tous les couples ont été découpés dans du carton rigide.
- Ensuite j'ai utilisé ces gabarits deux à deux pour découper au fil chaud dans du polystyrène la section de la coque comprise entre eux (il faut prendre garde au positionnement relatif des deux gabarits sinon le résultat sera ... tordu !! ...).
- Une fois les sections découpées, y a plus qu'à les empiler en les collant au double face pour obtenir un moule splendide (!).
- J'aurais pu en rester là, mais j'ai, en plus, intégré à ce moule les deux pièces en contreplaqué qui supporteront les panneaux de fermeture, de ce fait solidarisés à la coque dès le moulage, et je l'ai revêtu de gros scotch marron (celui pour déménager) pour avoir un meilleur état de surface interne et éviter que le polystyrène ne boive trop de résine.
Première chose à faire : consolider (à la fibre de verre hachée + résine époxy) les angles vifs présents sur la coque (parties difficiles à mouler car la fibre prend assez mal les plis et la résine a tendance à couler).
Ensuite : perçage des emplacements des tubes de passage des barres de plongée et collage de ces tubes en place (toujours à la résine époxy).
Vient alors l'étape la plus pénible (ça met de la poussière partout !!) : le masticage et le ponçage. J'ai enduit de Syntofer puis poncé et répété ces deux étapes jusqu'à avoir la forme et le fini voulu.
A la fin de l'été 2002 la coque ressemblait enfin à quelque chose mais était encore trop pleine de trous pour pouvoir être testée.
J'ai collé à leur place tous les morceaux de tiges filetées qui serviraient à la fermeture des panneaux. Pour les joints des ces deux panneaux, j'ai tout simplement coulé un cordon de silicone que j'ai un peu écrasé avec le panneau préalablement savonné (sinon ... ça colle ...). L'orifice destiné au bras manipulateur a été fermé de la même façon avec un petit panneau en aluminium.
Pour les trous qui recevront les projecteurs, j'ai usiné (dans de la plaque de plastique transparent jaune) cinq petits hublots qui ont été collés à la résine époxy.
Pour avoir une coque potentiellement (!) étanche, il ne restait plus qu'à mettre en place les barres de plongée. Celles ci sont réalisées avec des tubes en laiton de 4 mm, qui permettent de passer les fils d'alim. des moteurs. Ils sont réunis à l'intérieur par un domino.
Premiers essais :
Pour la première immersion, n'ayant rien d'autre à disposition, c'est un seau qui m'a servi de bassin de test (20 cm, c'est pas les abysses, mais bon ...).
Tous les panneaux ont été bien (?) fermés et les tubes de barres de plongée bouchés au silicone.
J'ai immergé l'engin un certain temps (3-4 heures). Au bout du compte, pas d'eau à l'intérieur et ça, ça fait plaisir !!
Dimanche 26 : 2eme essai (j'ai remis de la graisse dans les tubes d'étanchéité et j'ai mieux serré les panneaux de fermeture), au bout de 20 min, autant d'eau que le jour précèdent en 7h !!
=> la raison est simple cette fois: un des bouchons en silicone qui obstrue les trous de passage des fils des moteurs dans les "barres de plongée" s'est barré, ouvrant un orifice de 3mm de diamètre (si l'eau n'était pas rentrée, ça n'aurait pas été normal !!). Je refais donc les bouchons en balsa cyanolité et je remets la passoire à l'eau.
Lundi 27 : je sors le truc de l'eau le matin, pas une goutte à l'intérieur (la fuite initiale venait donc aussi des bouchons).
=> C'était gagné, la coque était fiable.
Observations : au niveau vitesse et nervosité, ça s'annonce pas mal, mais je ne sais pas encore trop comment va se comporter le truc en navigation normale (vu la forme de la carène). Le point délicat sera à mon avis l'équilibrage.
Poursuite des essais :
Après un hiver sans grandes évolutions, j'ai voulu profiter du printemps pour refaire quelques plongées afin de fignoler lestage et équilibrage, ainsi que pour tester deux-trois autres bricoles.
J'ai aussi profité d'une des plongées pour tester les hélices... Oui, parce qu'au fait, dès le début, j'avais prévu d'équiper la bête avec des hélices "maison", surtout pour leur donner un aspect un peu plus moderne.
Une fois à l'eau, un point positif : l'ensemble ne se disloque pas une fois en rotation et les pales restent à leur place. Du reste, l'effet propulsif est là, certes, mais pour ce qui est de l'efficacité, c'est pas génial. Le flux d'eau radial est très important mais le flux axial est beaucoup trop faible pour être réellement efficace.
Conclusion, si ce n'est pas une franche réussite...ce n'est pas totalement loupé et je me repencherai sur la question un de ces jours (en m'orientant plutôt vers un type pump-jet avec rotor et stator pour réorienter le flux). En attendant, j'ai deux hélices d'exposition et la propulsion se fait avec des modèles classiques du commerce de diamètre 25mm, tripales.
Vers la fin du mois de juin j'ai refais quelques plongées. La bulle était cette fois correctement fixées et pourvue d'une plaque de plomb sur la face interne pour en compenser la flottabilité. Le reste du plomb était à l'interieur collée sur le panneau principal (sous forme d'un seul lingot, ... ' prend de la place tout ça !).
L'ensemble commence à être stable et à devenir pilotable, mais on peut raisonnablement penser que le comportement serait amélioré en reportant le plomb à l'extérieur, en dessous. Le lest étant encore relativement proche du point de poussée, l'effet de quille est trop faible.
Enfin, malgré cela, le pilotage devient intéressant. En contrôlant la poussée on peut, compte tenu de la forme de la coque, réussir à maîtriser l'immersion. Sur l'axe de lacet le contrôle est très délicat, mais on s'y fait. Ce serai plus plaisant en mixant les commandes de vitesse des deux moteurs.
  cliquez sur les photo pour les agrandir
A cette occasion, j'ai pu tester l'éclairage. L'ensemble se compose de 5 DEL, avec réflecteurs, alimentées pour l'occasion, en parallèle, par un accus de 2.4V 170mA (horloge de magnétoscope), la commande est faite par un inter électronique (double inter à relais provenance RC Marine).
L'essai en plongé à été assez court, mais l'effet n'est pas mal (pas de photo pour l'instant). Le faisceau est relativement directif ce qui permet d'avoir une portée efficace intéressante. Je conseil l'utilisation de DEL (blanches, "haute luminosité") pour ce type de système car faible conso, grande durée de vie, différents angles de faisceau disponible, et il en existe maintenant qui ont des puissances d'éclairement plus qu'intéressantes.
Ainsi c'est achevée cette campagne de plongée.
Evolution de la construction :
Depuis cette période, ça évolue (...lentement, mais sûrement).
La coque est en cours de peinture (rouge et noir, pour changer du jaune).
J'ai recoulé le lest dans des tubes qui seront fixés sur l'extérieur de la coque (pas exactement comme sur les photos). Cela améliorera la stabilité et permettra de se poser au fond. Je vais maintenant remonter l'ensemble proprement et me repancher sur la question du ballast.
A bientôt pour la suite !!
« retour à "Modelisme"
|